Research
Our lab focuses on robotics, AI, and intelligent systems that enable robust, autonomous operation in complex real-world environments.
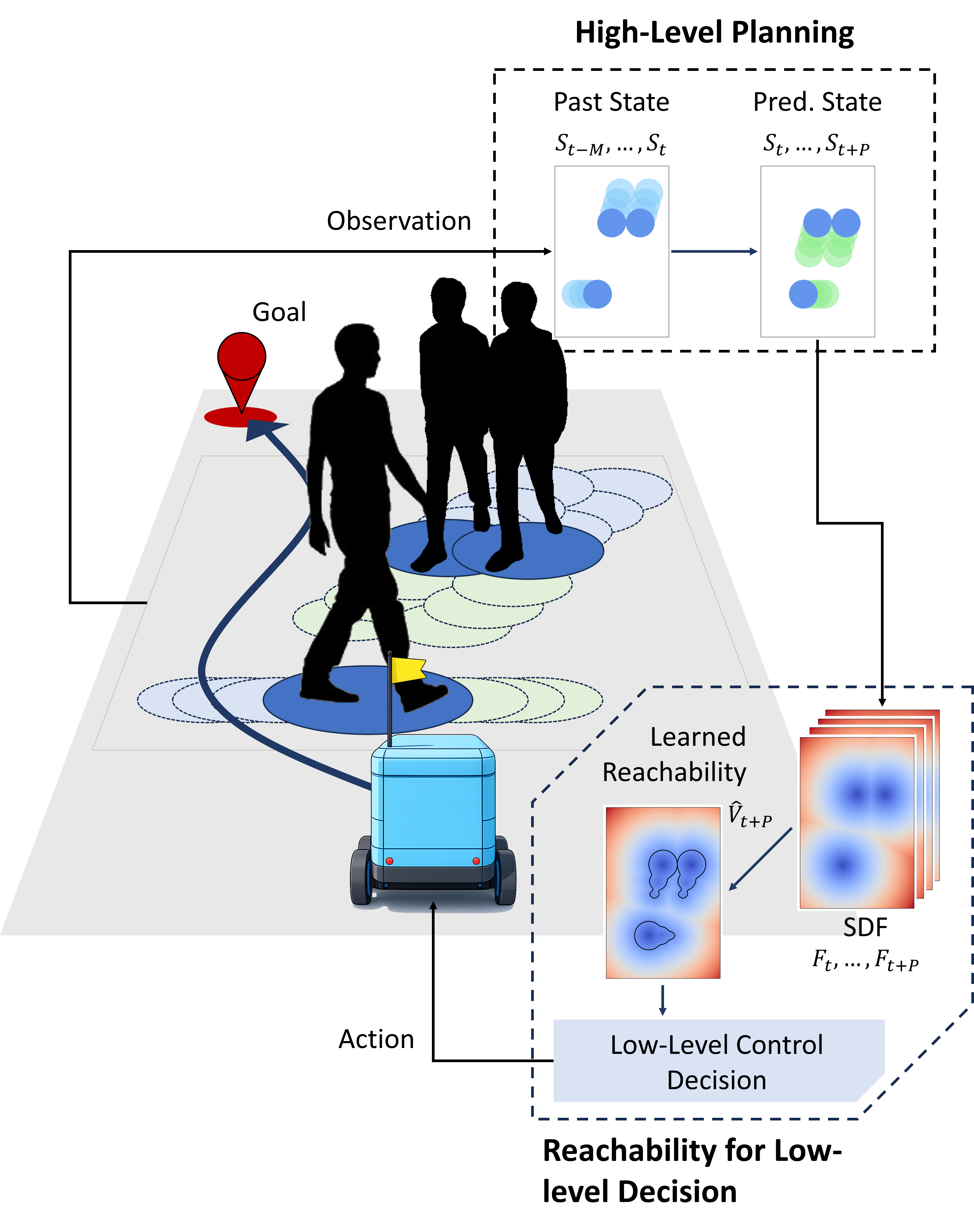
Social Navigation
Human-aware motion planning for safe and natural robot behavior in shared spaces.
We model personal space, group interactions, and social norms to generate trajectories that remain efficient while improving comfort, predictability, and safety around people.
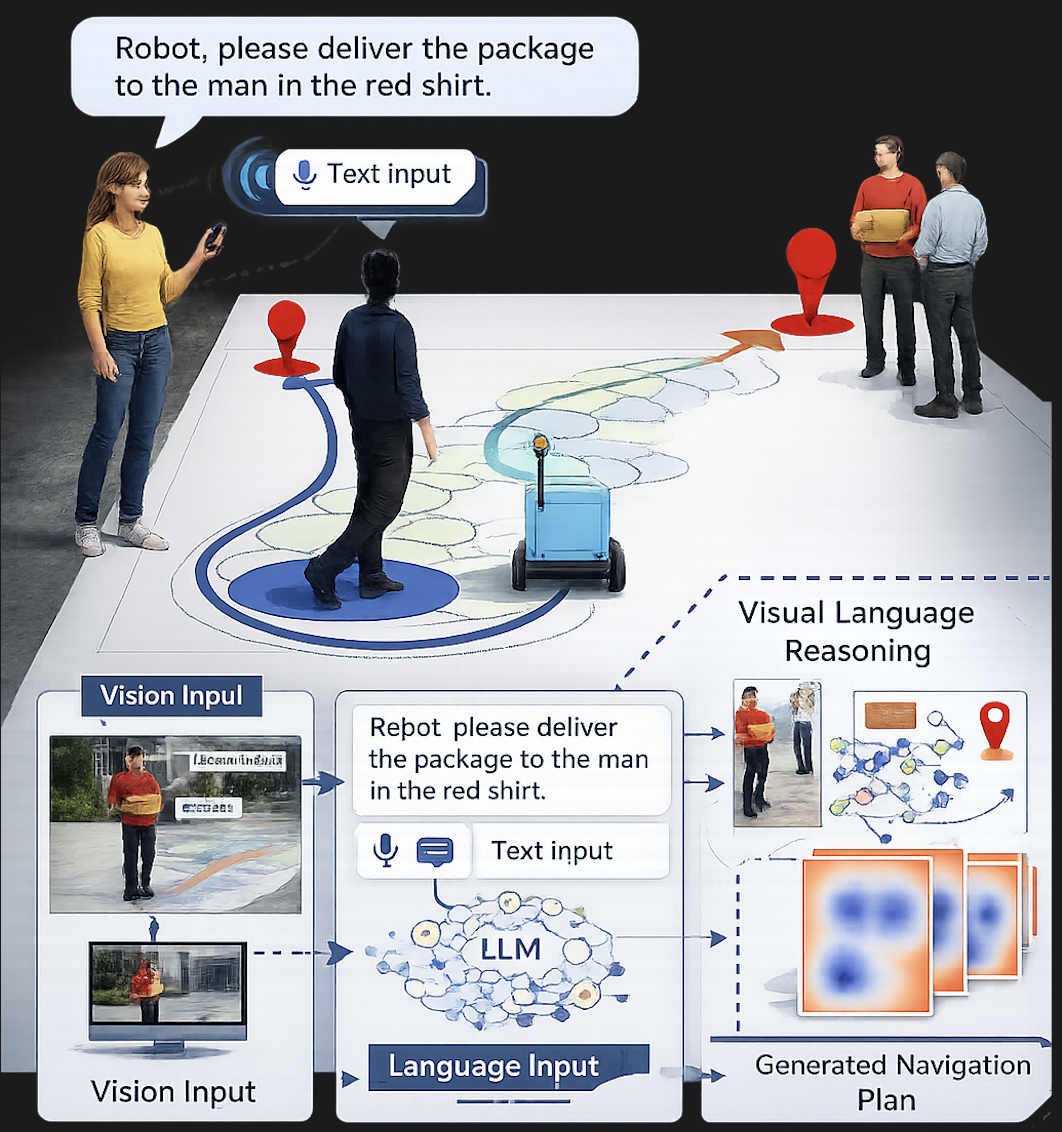
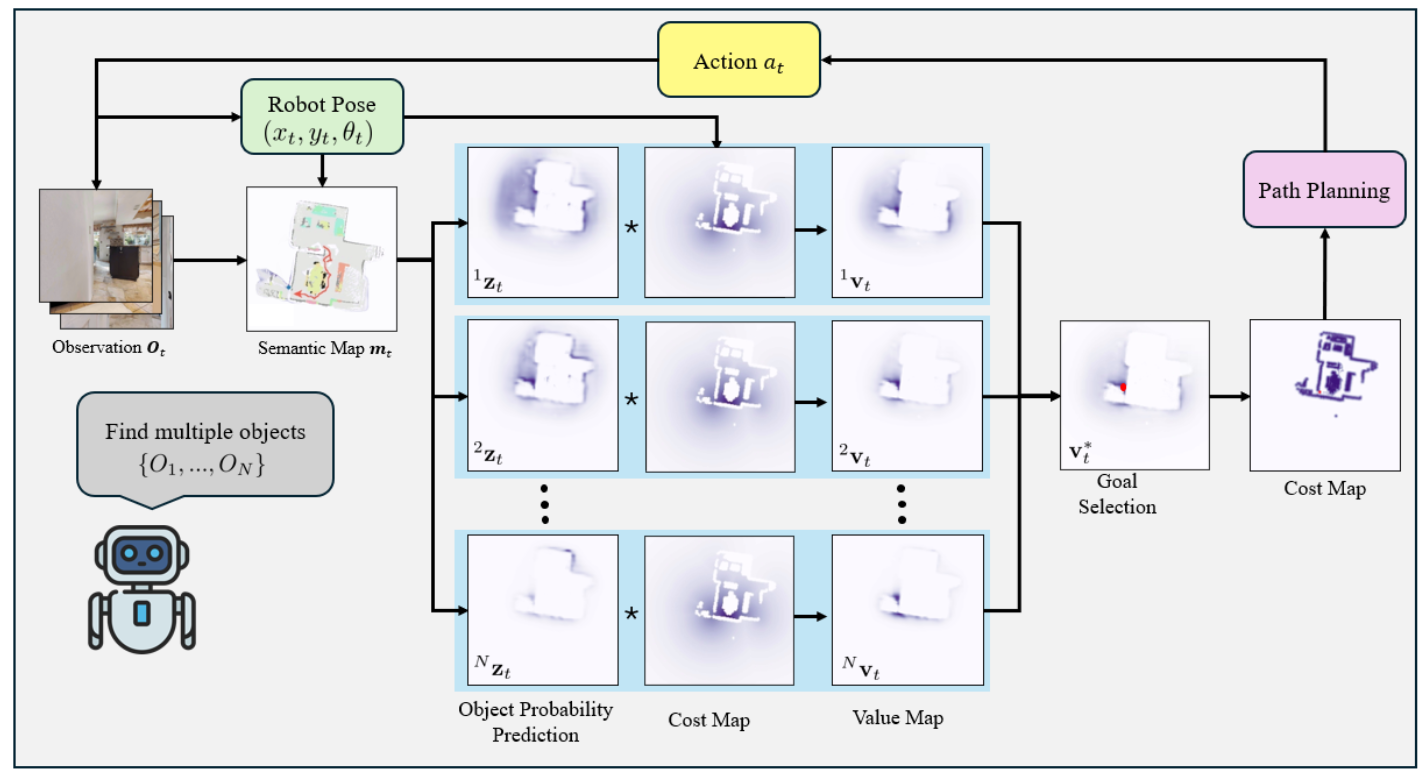
Vision-Language Navigation
Language-guided navigation that grounds natural instructions in visual scenes.
We develop embodied agents that align textual goals with scene understanding, improving instruction following, long-horizon planning, and generalization to unseen environments.
Physical AI & Applied Robotic Systems
Deployable AI-driven robotic systems for real-world industrial and service scenarios.
We integrate perception, control, and autonomy into end-to-end platforms, emphasizing reliability, safety validation, and practical performance under field constraints.
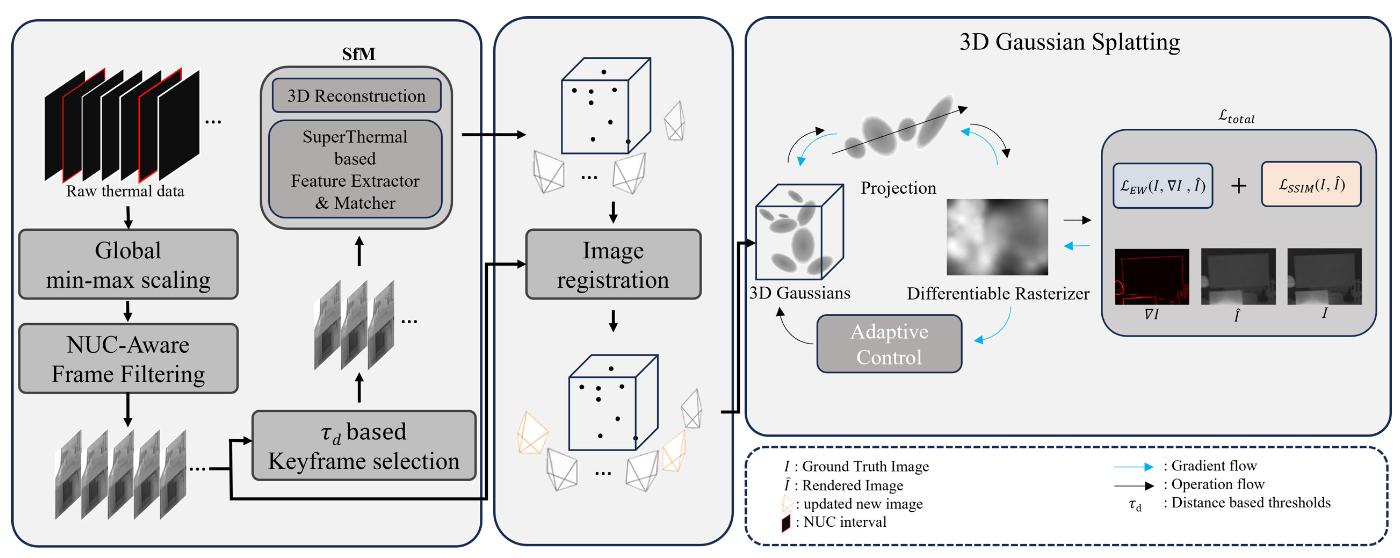
Neural 3D Reconstruction
Learning-based 3D scene reconstruction and compact geometric representations.
We study neural fields and hybrid 3D representations for accurate geometry, view synthesis, and semantic structure that support perception and simulation for robotics.
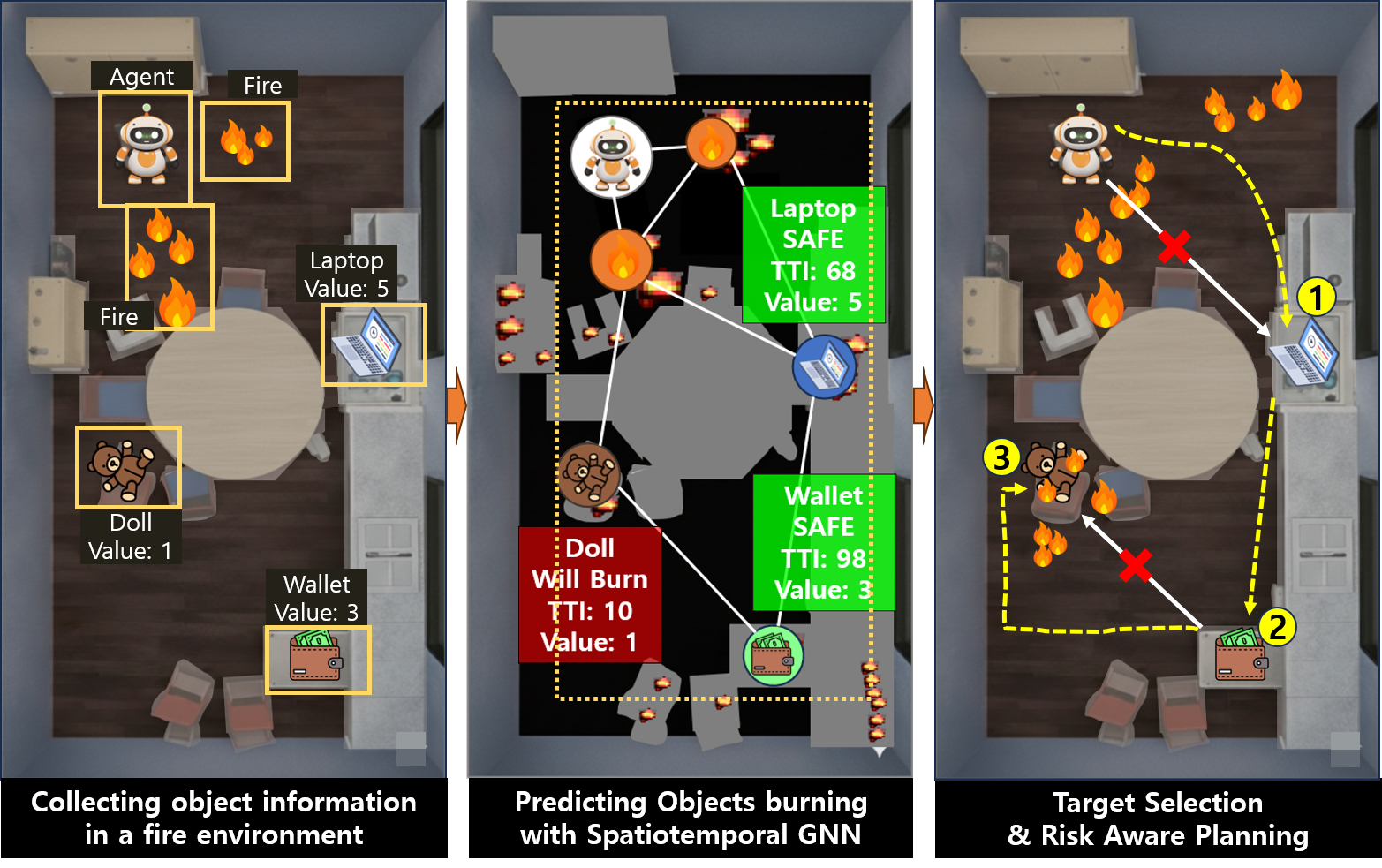
Autonomous Exploration
Self-directed exploration for efficient environment coverage and information gain.
We design autonomous strategies that couple perception and planning to explore unknown spaces, reduce uncertainty, and build useful maps under sensing and compute constraints.
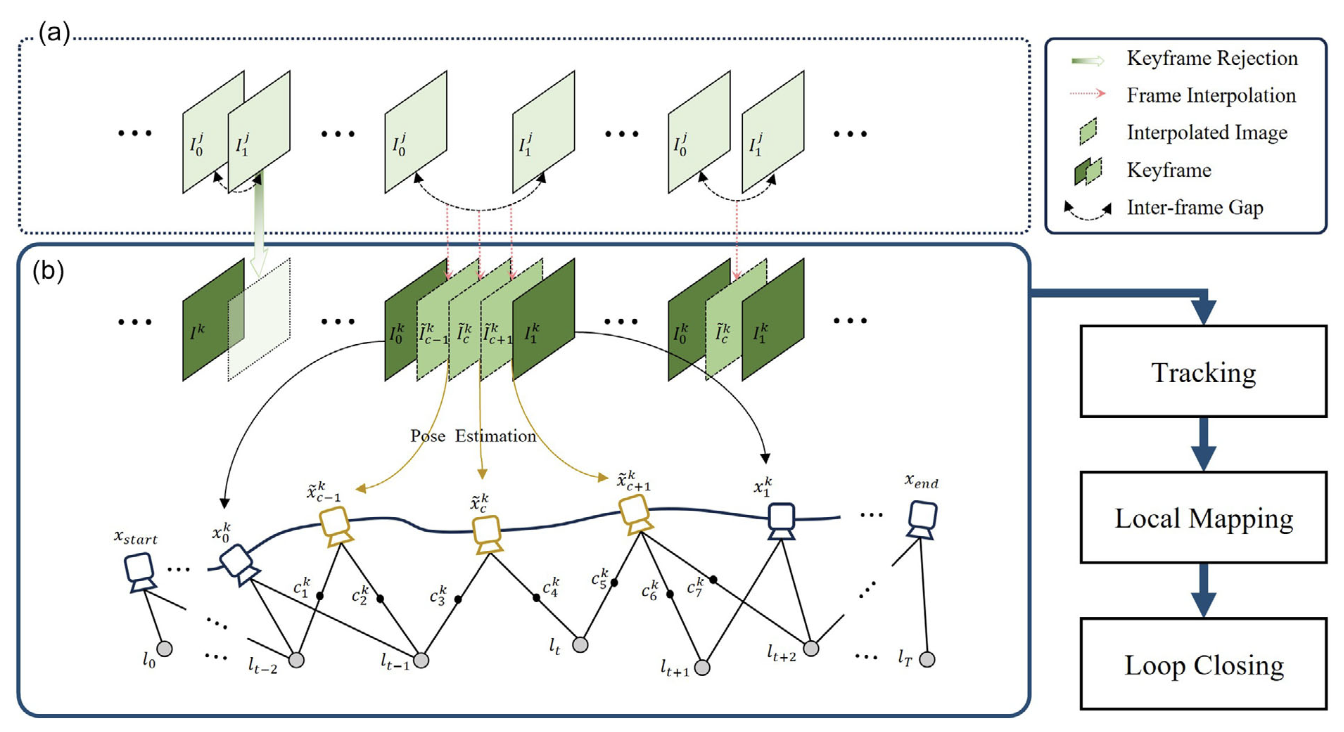
SLAM in Challenging Environments
Localization and mapping in dynamic, real-world environments.
Our SLAM research targets long-term consistency, drift reduction, and map update strategies for environments with moving objects and changing geometry.

Multi-Robot Systems
Cooperative perception, planning, and task allocation across robot teams.
Our work focuses on decentralized coordination, communication-efficient collaboration, and scalable fleet intelligence for exploration, transport, and monitoring tasks.

Robotic Construction and Operation
Autonomous and tele-operated robotic solutions for construction, assembly, and on-site infrastructure operation.
We develop end-to-end robotic approaches for construction and operation tasks, including mobile manipulation, modular assembly, large-part handling, and site-aware perception and planning. Research spans task/motion planning, state estimation, robust perception in cluttered outdoor sites, human–robot collaboration and safety, simulation-to-field transfer, and system integration for practical field demonstrations. Our goal is to improve productivity, reliability, and sustainability across construction and infrastructure operation workflows.